Error Code 33
ERROR CODE 33:
The error occurs when the TCU does not communicate with the selected motor controller
Possible solutions:
1. CAN L i CAN H is incorrectly connected:
-Make sure you have connected CAN L and CAN H pins correctly
-You can try swapping CAN L and CAN H and see if that solves the problem
-Possible faulty pin connector. Try try a new pin connectors.
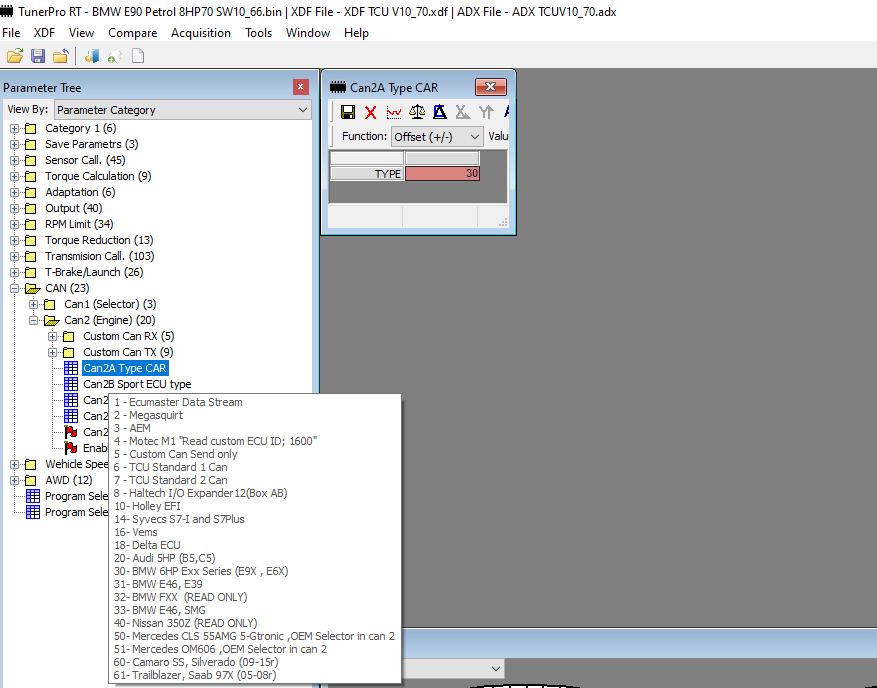
2.Wrong CAN BUS communication standard selected:
- Check if the correct CAN BUS protocol standard has been selected